
| Name | Description | Requirements implemented | Devices connected | Devices managed |
|---|---|---|---|---|
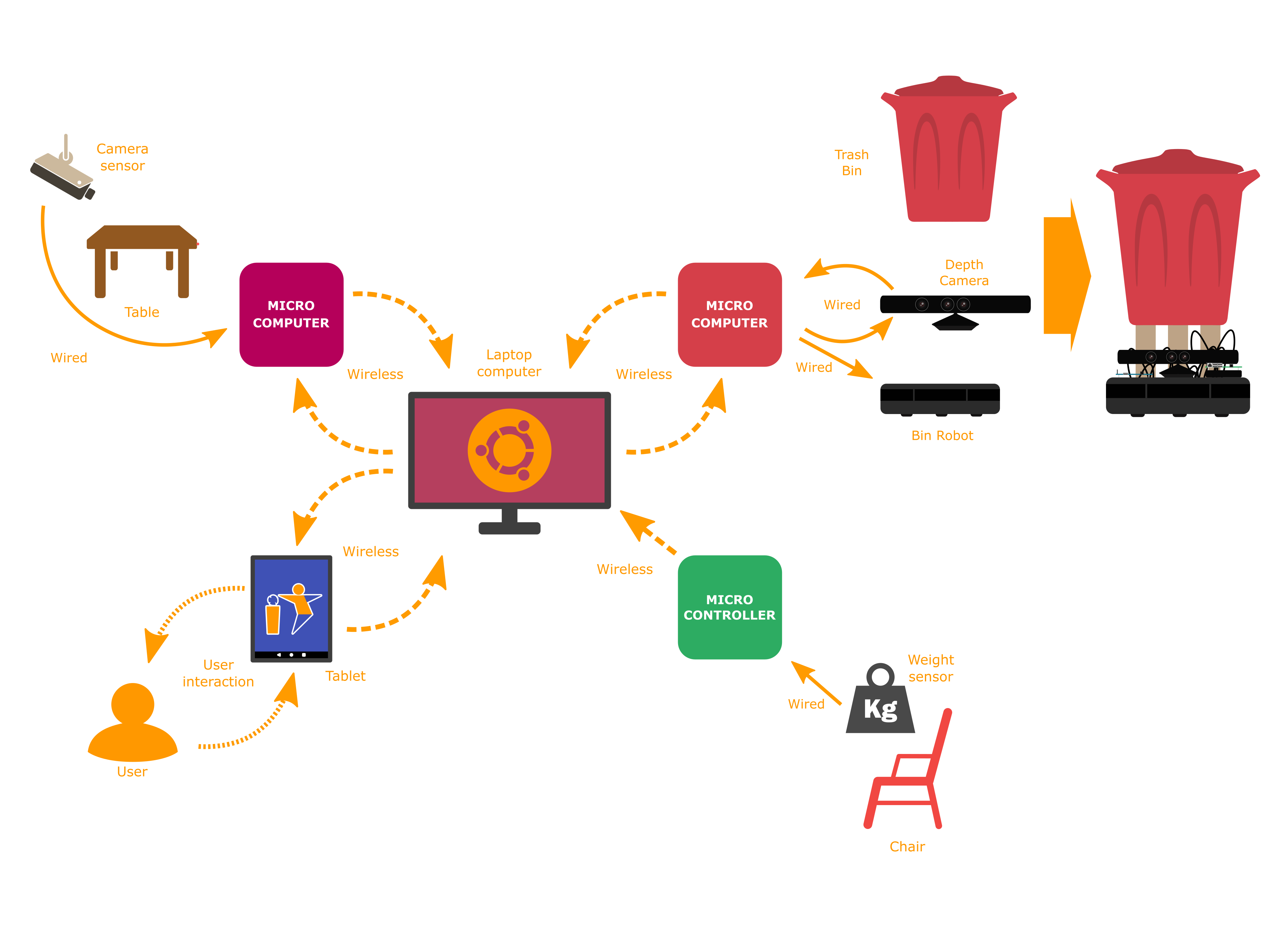
| Bin computer | Collects bin depth camera and odometry sensor information. Performs computations for bin navigation and directs the bin’s movement | FR 2.* | Bin robot, bin depth camera | Master computer |
| Camera computer | Performs the necessary computations for the sensing of objects on the table | FR 1.2, 1.3 | Camera Sensor | Master computer |
| Table microcontroller | Transmits weight sensor data to master computer | FR 1.1 | Weight sensor | Master computer |
| Master computer | Serves as central node of the network, performs all system heavy computations | FR 1.1, 2.*, 3.6, 4.* | Bin computer, camera computer, table microcontroller, portable tablet | None |
| Name | Function | Requirements implemented | Location |
|---|---|---|---|
| Camera sensor | Collects imagery of tables | FR 1.2, 1.3 | Ceiling |
| Weight sensor | Detects the presence of a person sitting on a chair | FR 1.1 | Embedded in a chair |
| Bin robot | Transports the bin to the desired location | FR 2.* | Beneath the bin |
| Bin depth camera | Collects depth scan data used for bin navigation | FR 2.* | On top of bin robot |
| Bin | Collects trash from users | None | On top of bin robot |
| Name | Function | Requirements implemented | Location |
|---|---|---|---|
| Tablet | User interface to control the bin | FR 3.*, FR 4.* | Entrance of the environment, staff work area |
| Bin button | Sends the bin back to its docking location | FR 2.2 | On top of the bin robot |
| Name | Requirements implemented | Host node | API |
|---|---|---|---|
| Tablet application | FR 3.*, 4.* | Tablet | Mobile API, socket API for data exchange with laptop, table management API |
| Computer vision module | FR 1.2, 1.3 | Camera computer | Computer Vision API |
| Weight sensor controller module | FR 1.1 | Weight sensor microcontroller | Bluetooth API, weight sensor API |
| Bin navigation module | FR 2.* | Bin computer, master computer | ROS |